Sensor/Camera
Homography or Projective Transformation
전두선
2020. 8. 17. 16:27
Homography(Projective Transformation)
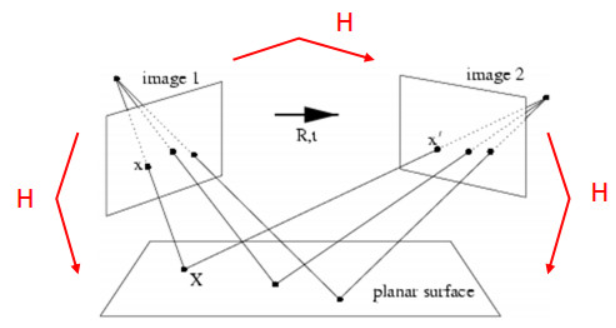

Planar surface 물체의 경우에는 3D 공간에서의 2D 이미지로의 임의의 원근투영변환(perspective projective transformation)을 두 이미지 사이의 homography로 모델링할 수 있다. 즉, 어떤 planar surface가 서로 다른 카메라 위치 혹은 카메라와 레이더포인트에 각각 투영되었다면 이 둘 사이의 관계를 homography로 표현할 수 있다.
homography는 homogeneous 좌표계에서 정의되며 일반식은 아래와 같다.

여기서, s는 0이 아닌 크기 요소(scale factor)이고 H는 호모그래피 행렬(homography matrix)이다.
-
8의 자유도를 갖는다.
-
homography matrix를 구하기 위해서는 최소 4개의 매칭쌍이 필수적이다.
references