
| 카메라(Vision) | 레이더(Radar, Radio Detection And Ranging) | 라이다(LiDAR, Light Detection And Ranging) | |
| 원리 | 영상을 통해 시각적인 정보를 인지한다. | - 강한 전자파를 발사하여 타겟에 반사되어 되돌아오는 전자파를 분석하여 타겟과의 거리를 측정한다. - 파장이 긴 저주파를 사용하면 전파의 감쇄가 작고 먼 곳까지 탐지할 수 있지만 해상도는 낮다. - 파장이 짧은 고주파는 공기중에 포함되는 수증기,눈,비 등에 흡수 또는 반사되기 쉽기에 감쇄가 커서 먼 곳까지 탐지하지 못하지만 높은 해상도를 얻을 수 있다. 이러한 특성으로 레이더는 측정 거리와 측정 각도를 동시에 늘리는 것이 어렵기 때문에 보통 ADAS에서는 장거리용과 중/단거리용 레이더로 나누어 적용된다. 기술측면에서 차량용 레이더는 데이터의 정확성을 높이기위해 측정 거리와 측정 각도, 주파수 대역폭의 확대를 목표로 발전하고 있다. |
- 레이더에서 전파가 레이저 광선(고출력 펄스레이저)으로 바뀌었다고 보면 되며, 흔히 레이저 레이다라고 부르기도 함. - 파장의 길이가 매우 짧은 고주파 사용(905nm 또는 1550nm) |
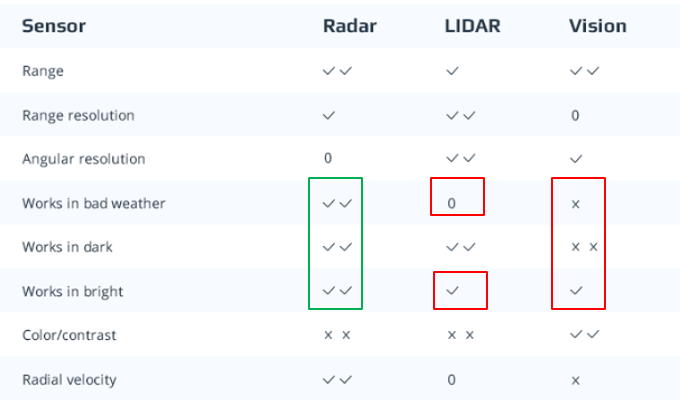
| 장점 | - RGB 영상을 통해 풍부한 2d 시각적 정보를 얻을 수 있다. | - 탐지 범위가 길다 - 날씨와 밝기 변화에 견고하다. - 높은 거리분해능과 높은 속도 분해능 |
- dense한 포인트 클라우드로 물체의 형태를 잘 표현할 수 있다.(각도/거리 분해능이 높음) |
| 단점 | - 날씨와 밝기변화에 민감하다. - 물체와의 정확한 거리를 알기가 어렵다. |
- sparse한 포인트 클라우드로 물체의 형태를 정확하게 표현할 수 없다. (각도(방위각) 분해능 낮음) - 작은 물체 감지능력이 제한적. |
- 날씨와 밝기변화에 민감하다. - 가격이 많이 비싸다. |
| 데이터 | [img(r,g,b)] | [range,azimuth,doppler] | [x,y,z] |
| 특징 |
카메라는 레이더/라이다를 통해 파악할 수 없는 정확한 형상정보를 확인할 수 있다. 교통 표지판의 인식, 사각 지대 탐지, 차선 이탈 등 을 판단하기 위해서는 카메라를 통한 데이터의 정확한 분석은 필수적이다. - 스테레오/RGB-D(뎁스카메라)를 사용하면 어느정도 유의미한 거리정보도 얻어올 수 있음. |
차량 레이더로 사용되는 대표적인 방식은 주파수 연속 변조 방식(FMCW, Frequency Modulated Continuous Wave) 레이더이다. ex> 77/60/24GHz FMCW Radar - FMCW 레이더 기술은 연속적으로 주파수가 변화하는 삼각파 혹은 톱니파 레이더 신호를 타겟을 향해 송신하고, 반사된 신호를 분석하여 타겟까지의 거리나 타겟의 속도를 판단할 수 있음 - FMCW 방식은 다른 변조 방식에 비해 비교적 제작이 용이하고, 성능적 측면에서 비교적 가까운 거리에서도 높은 거리 분해 능력 및 속도 분해 능력을 가져서, 차량 레이더 분야에 많이 사용되고 있음 |
주사식 스캐너와 섬광 스캐너로 구분된다. - 주사식 스캐너는 라이다에서 나온 레이저 광선이 타겟에 반사된 뒤 다시 센서로 돌아오기 까지의 시간을 측정하여 거리를 측정한다. 채널 수가 높을 수록 1회 회전당 스캐닝할 수 있는 수직 범위가 넓어지므로 더욱 세밀하게, 높은 정밀도로 측정가능하다. 주사식 라이다의 가장 큰 장점은 매우 높은 위치 정밀도를 보장한다는 점. - 섬광 스캐너는 펄스 레이저와 정밀하게 교정된 렌즈, 그리고 고성능 이미지 센서를 통해 구성된 스캐너이다. 주사식 스캐너와 달리 빔 스플리터라고 불리는 특정한 레즈에 의해 발사된 빔이 수천 갈래로 나누어져 발사되며, 이후 물체에 반사된 빔이 PMT와 CCT에 각각 수신될 때, PMT에는 되돌아온 빛의 수신 시간이, CCD에는 패턴이 반사된 이미지가 촬영된 것을 사용해 특정 빔이 언제 도착했는지를 연산하여 한번에 특정영역을 통으로 스캔할 수 있도록 해준다. 섬광 스캐너는 주사식 스캐너에 비해 주변 환경을 다시 읽는, 소위 Sampling rate가 매우 높은것이 장점으로 차량의 자율주행을 위한 라이다는 보통 이 방식의 라이다가 사용된다. 빠른 속도로 특정 각도에 대응하는 전체 공간의 데이터를 얻어야 하는데, 이는 큰 정밀도 보단 높은 반응속도를 요하기 때문이다. |
* 최근 나오는 고정형 라이다의 경우 많이 저렴해짐, 또한 차량 안에 내장할 수 있는 제품이 개발되고 있음.
* 레이더의 경우 4D 이미지 레이더라고 어떤 형태인지 구분이 가능한 제품이 개발되고 있다.
'자율주행' 카테고리의 다른 글
| 4차 산업혁명의 핵심, 자율주행 (0) | 2021.04.17 |
|---|